파이버 레이저 로봇 용접 시스템
LPT-FLRWS는 일관되고 빠른 용접과 함께, 자동 와이어 결합 용접으로 다양한 형태와 재질에 대하여 로봇 용접이 가능하게 하며 정확한 용접위치와 적은 용접 열 발생으로 용접물의 변형을 최소화하고 열 영향 층이 적어서 전통적인 용접보다 후 공정인 연삭, 연마의 공정이 최소화되어 생산성이 향상되고 스크랩이 감소됩니다.
또한 사용자 관점을 통합 MMI 프로그램은 쉽게 배우고 작동하기 쉬워 운영자로 하여금 다양한 대상물에 대하여 용접 자동화를 적용할 수 있게 함으로 장비 운영 효율을 높일 수 있습니다. 본 로봇 용접 시스템만의 또 다른 특징은 고객이 선호하는 로봇과 레이저를 선택하여 특별한 어려움 없이 구성이 가능합니다.
이는 장비를 적용한 관리 측면에서 많은 장점을 제공합니다.
- ㆍ
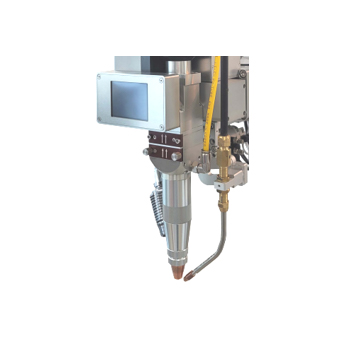
- 기본 구성 : 로봇 / 파이버 레이저 / 레이저 용접 헤드 / 통합 제어반 / 냉각기
- ㆍ
- 선택 사양 : 와이어 피더 / 용접 포지셔너 / 부가 축
- ㆍ
- 기타 선택 사항 : 레이저 및 로봇 사양과 브랜드는 고객의 요구에 맞추어 구성 가능